CONTROLLING A DC MOTOR
A thyristor bridge is a technique commonly used to control the speed of a DC motor by varying the DC voltage.

It is important to note that the voltage applied to a DC motor must not be greater than the rated nameplate. Armature windings are commonly wound for 500 VDC. The control logic in the drive must be adjusted to limit available DC voltage to 0 - 500 VDC. Likewise, the shunt field must be limited to the motor’s nameplate value.

A DC drive supplies voltage to the motor to operate at a desired speed. The motor draws current from this power source in proportion to the torque (load) applied to the motor shaft.

100% SPEED 0% LOAD
In this example an unloaded motor connected to a DC drive is being operated at 100% speed. The amount of armature current (Ia) and unloaded motor needs to operate is negligible. For the purpose of explanation a value of 0 amps is used.
The DC drive will supply only the voltage required to operate the motor at 100% speed. We have already learned the amount of voltage is controlled by the gating angle (COSα) of the thyristors. In this example 450 VDC is sufficient. The motor accelerates until CEMF reaches a value of Va - IaRa. Remember that Va = IaRa + CEMF. In this example IaRa is 0, therefore CEMF will be approximately 450 VDC.

100% SPEED 100% LOAD
A fully loaded motor requires 100% of rated armature current at 100% speed. Current flowing through the armature circuit will cause a voltage drop across the armature resistance (Ra). Full voltage (500 VDC) must be applied to a fully loaded motor to operate at 100% speed. To accomplish this, thyristors are gated earlier in the sine wave (36.37°).
The DC drive will supply the voltage required to operate the motor at 100% speed. The motor accelerates until CEMF reaches a value of Va - IaRa. Remember that Va = IaRa + CEMF. In this example armature current (Ia) is 100% and Ra will drop some amount of voltage. If we assume that current and resistance is such that Ra drops 50 VDC, CEMF will be 450 VDC.

Up to this point we have only looked at a drive in single-quadrant operation. A single-quadrant DC drive will have six thyristors.
In the speed-torque chart there are four quadrants of operation according to direction of rotation and direction of torque. A four-quadrant DC drive will have twelve thyristors.

SINGLE QUADRANT OPERATION
Single-quadrant drives only operate in quadrant I. Motor torque (M) is developed in the forward or clockwise (CW) direction to drive the motor at the desired speed (N). This is similar to driving a car forward on a flat surface from standstill to a desired speed. It takes more forward or motoring torque to accelerate the car from zero to the desired speed. Once the car is at desired speed your foot can be let off the accelerator a little. When the car comes to an incline a little more gas, controlled by the accelerator, maintains speed. To slow or stop a motor in single-quadrant operation the drive lets the motor coast.

There are two ways to change the direction of a dc motor
1. Reverse Armature Polarity
2. Reverse Field Polarity

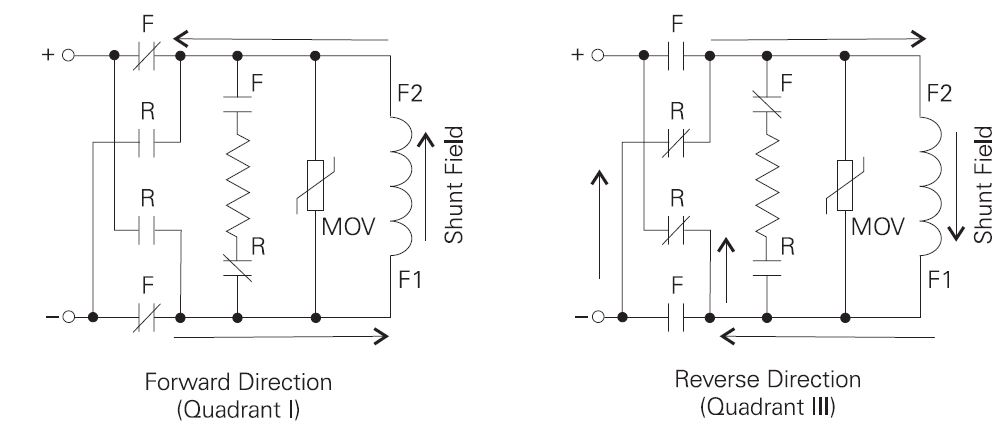
REVERSING IN SINGLE QUADRANT OPERATION
Field contactor reverse kits can be used to provide bidirectional
rotation from a single-quadrant drive. To turn the motor in the forward direction the “F” contacts are closed, applying DC voltage in one polarity across the shunt field. Simply reversing the polarity of the field, by opening the “F” contacts and closing the “R” contacts, will reverse direction of a DC motor.
It is important to note that field reversal will only work when a quick reversal is not required. The field circuit is inductive and must be brought to 0 current before opening the contacts.
STOPPING A MOTOR
Stopping a motor in single-quadrant operation can be done by simply removing voltage to the motor and allowing the motor to coast to a stop. Alternatively, voltage can be reduced gradually until the motor is at a stop. The amount of time required to stop a motor depends on the inertia of the motor and connected load. The more inertia the longer the time.
DYNAMIC BRAKING
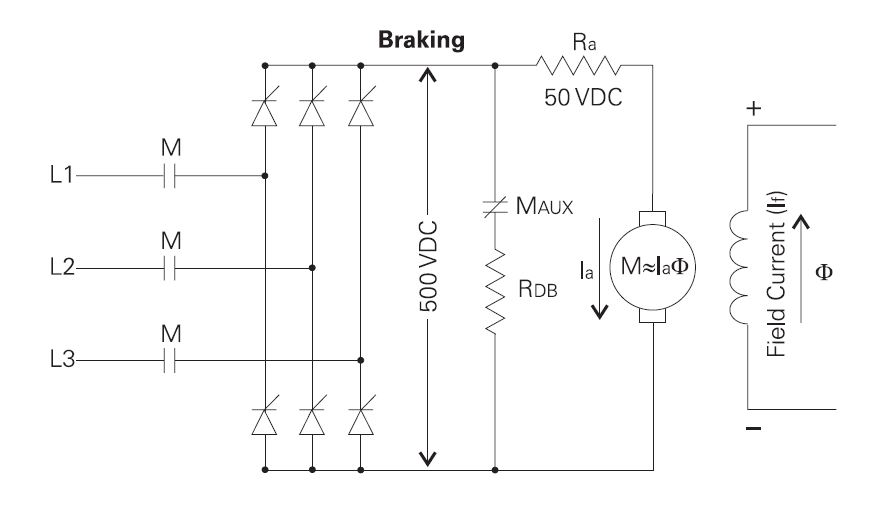
Dynamic braking is often used on single quadrant drives as a means of stopping a motor quickly. Dynamic braking is not recommended for continuous or repetitive operation. Dynamic braking kits for use with Siemens drives are typically designed to stop a load operating at base speed a maximum of three consecutive times. After three consecutive stops a waiting period of 15 minutes is required.
Dynamic braking develops stopping torque by using a contact (MAUX) to connect a resistor (Rdb) across the armature terminals after the drive controller turns off power to the motor. The field remains energized to supply stopping torque. This is because motor torque (M) depends on armature current (Ia) and field flux (Φ).
Armature current (Ia) reverses direction as the motor now acts like a generator. A reversal in armature current (Ia) results in a reversal of torque applied to the motor. Torque, now applied in the opposite direction, acts as a brake to the motor. Stored energy in the rotating motor is applied across the resistor and converted to heat. The resistor is sized to allow 150% current flow initially. Armature voltage decreases as the motor slows down, producing less current through the resistors. The motor is finally stopped due to frictional torque of the connected load.

The dynamics of certain loads require four-quadrant operation. If motor voltage is suddenly reduced, negative torque is developed in the motor due to the inertia of the connected load. The motor acts like a generator by converting mechanical power from the shaft into electrical power which is returned to the drive. This is similar to driving a car downhill. The car’s engine will act as a brake. Braking occurs in quadrants II and IV.

In order for a drive to operate in all four quadrants a means must exist to deal with the electrical energy returned by the motor. Electrical energy returned by the motor tends to drive the DC voltage up, resulting in excess voltage that can cause damage. One method of getting four-quadrant operation from a DC drive is to add a second bridge connected in reverse of the main bridge. The main bridge drives the motor. The second bridge returns excess energy from the motor to the AC line. This process is commonly referred to as regen. This configuration is also referred to as a 4-Quad design.

The motor receives power from the incoming line. In this example the motor is operating at full speed (500 VDC).

When the motor is required to stop quickly, the motoring bridge shuts off and the regen bridge turns on. Due to the initial inertia of the connected load the motor acts like a generator, converting mechanical power at the shaft into electrical power which is returned to the AC line. The IaRa voltage drop (-50 VDC) is of opposite polarity then when the drive was supplying motoring power. The control logic is gating thyristors in the regen bridge at an angle of 130° and the resultant DC voltage on the bridge is 400 VDC, in the opposite polarity. Because the regen bridge is of opposite polarity, the voltage applied to the motor acts like an electrical brake for the connected load.

REVERSING
A four-quadrant drive can easily reverse the direction of rotation of a DC motor simply by applying armature voltage in the opposite polarity. This is accomplished by using what was the regen bridge to motor. The bridge that was used to drive the motor in the forward direction becomes the regen bridge.











No comments:
Write comments